Студенты НГТУ НЭТИ создали робота-манипулятора с удаленным управлением для школьных лабораторных работ
В Новосибирском государственном техническом университете НЭТИ разработали манипулятор удаленного действия для применения в учебной деятельности. Устройством можно управлять с помощью мобильного приложения. Проект реализован в рамках студенческой проектной деятельности.
Работа была выполнена на кафедре общей физики командой из трех человек: Дмитрий Блинов (3 курс ФМА), Игорь Обухов (3 курс ФМА) и Евгений Побединский (2 курс РЭФ).
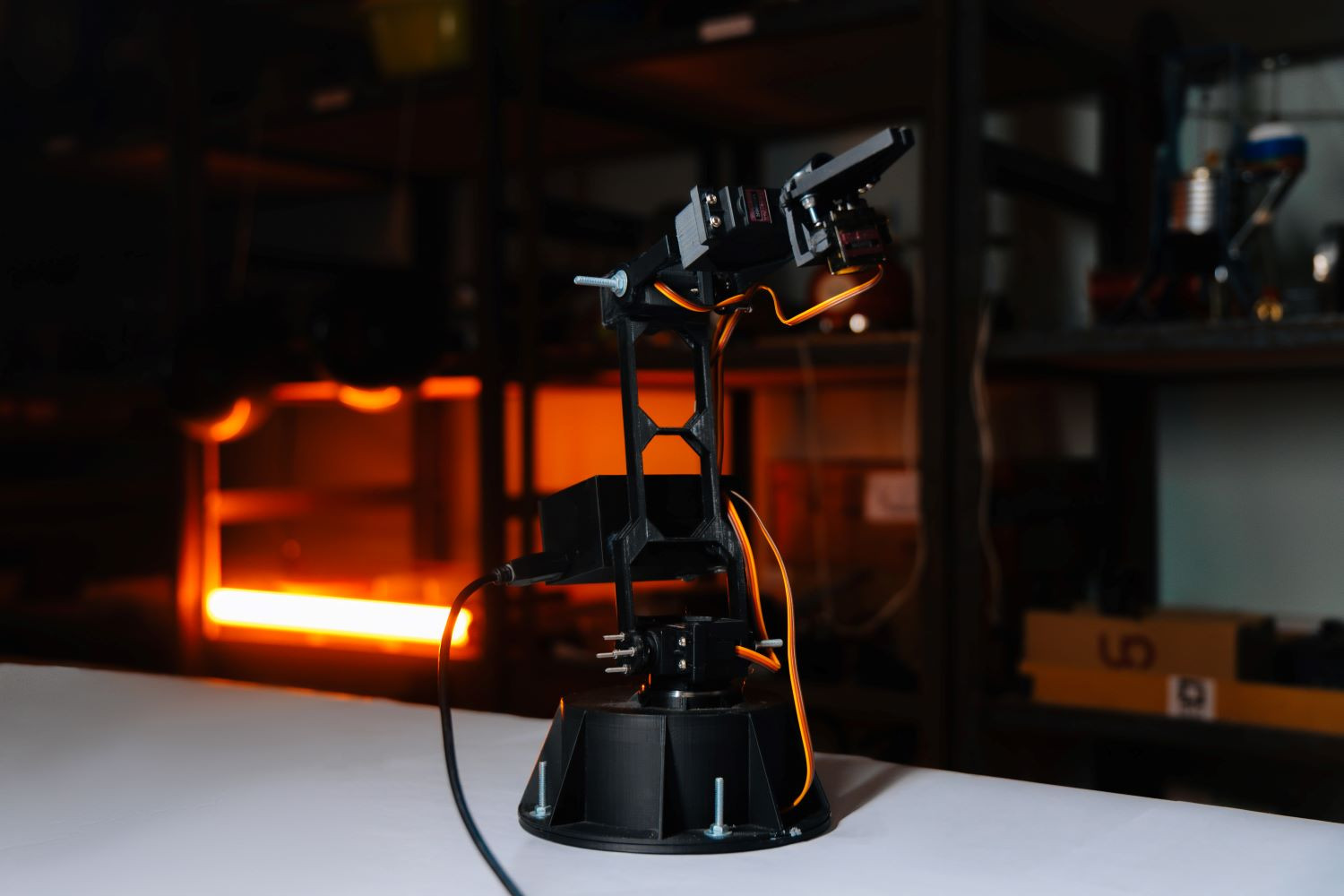
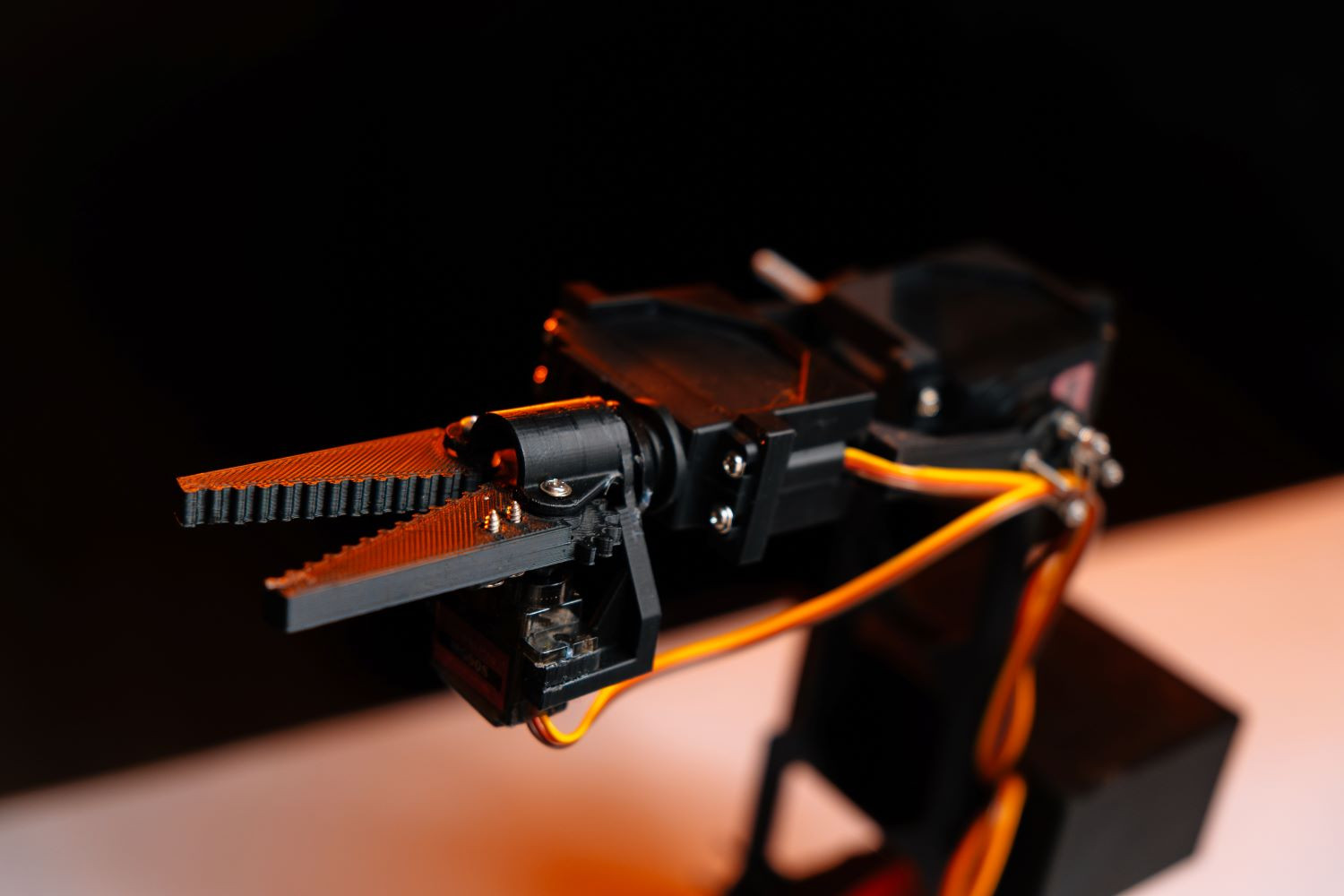
«Возникла идея создать робота-манипулятора, который мог бы использоваться в качестве вспомогательного инструмента при проведении лабораторных работ. Мы разработали прототип устройства, с помощью которого можно работать с твердыми порошковыми материалами и с жидкостными веществами в пробирках. Манипулятором можно управлять с помощью мобильного приложения», — рассказал один из разработчиков, студент факультета мехатроники и автоматизации Дмитрий Блинов.
Как отмечают студенты, в манипуляторе используются четыре степени свободы, что обеспечивает достаточную подвижность для выполнения базовых операций по перемещению и захвату объектов, а также плавность движений. Манипулятор позволяет решать проблему удаленного управления экспериментальной аппаратурой внутри лаборатории или рабочей зоны, проводить исследования, эксперименты в режиме реального времени, находясь при этом на расстоянии — например, в другом населенном пункте.
«Прототип манипулятора с удаленным управлением может использоваться в учебной деятельности не только для лабораторных работ по химии и физике. Школьники также могут познакомится с принципами работы устройств подобного типа, которыми можно управлять дистанционно, потренировать свои навыки в работе с манипулятором. Это будет интересно в первую очередь тем, кто увлекается робототехникой», — добавил Дмитрий Блинов.