Студенты НГТУ НЭТИ создали пневматические мышцы для роботов
Команда состоит из трех участников: Андрей Зверев, Константин Воронцов и Данил Наумов.
«В последнее время особую актуальность во многих сферах деятельности набирает робототехника и машиностроение. С командой мы решили сделать робота гуманоидного типа с пневмомышцами. Оказалось, что идея достаточно актуальна и востребованна. Изучив рынок и то, какие сейчас ведутся научные исследования, мы выявили, что искусственные мышцы имеют большую актуальность во многих системах», — рассказал главный разработчик проекта Андрей Зверев.
По его словам, мышцы работают при помощи пневматики за счет разности в давлении газов. Компрессор качает воздух, распределяя его по мышцам, которые приводятся в движение. Разработка студентов НГТУ НЭТИ состоит из двух направлений. Первое — это создание скелета и каркаса, в который вставляются мышцы, а также других механических частей робота. Второе — создание и внедрение в каркас пневматических мышц.
«Полгода назад мы нашли в интернете чертежи французского художника, который выложил в открытый доступ 3D-модели деталей робота гуманоидного типа в человеческий рост — 175 см. Робот приводится в движение, по задумке автора, при помощи электромоторов. Тогда мы с командой решили, что это будет хорошим прототипом. Мы использовали 3D-модели художника, переработали определенные детали, добавили свои и привели его в движение при помощи пневматики. Принцип работы похож на надувание воздушного шарика. Все, наверное, видели, как на ярмарках из длинных шаров делают разных животных. Здесь использован похожий принцип: мы создали специальное условие, когда помещаем силиконовую трубку в материал и подаем воздух. И получается, что наша мышца расширяется и сокращается. Это выглядит как работа настоящих мышц», — прокомментировал Андрей Зверев.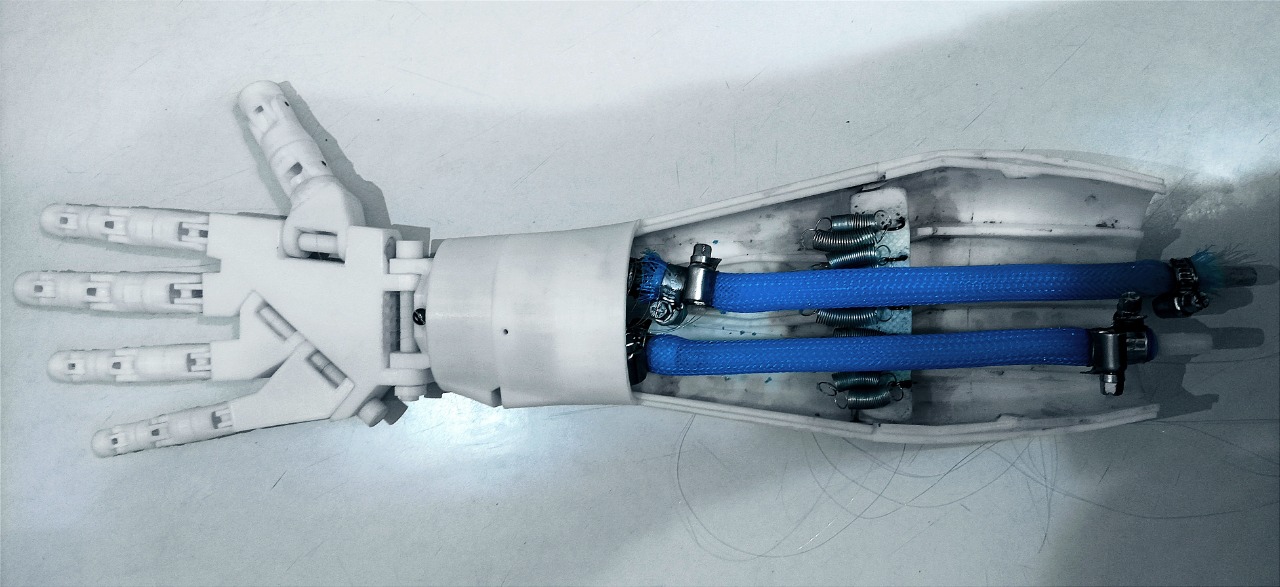
Сейчас разрабатывается тестовый образец руки, который будет управляться с пульта. В ближайшее время будет создано программное обеспечение с определенными командами и пультом управления для демонстрации функционала.
«Отличие нашей разработки от уже существующих аналогов в том, что у нас нестандартный принцип осуществления движения каких-либо механизмов, мы используем пневматические мышцы. Второй фактор — наша конструкция. Она достаточно легка в сборке и имеет инструкцию. Робота сможет собрать даже школьник 9 класса. Наша разработка будет иметь меньший вес по сравнению с аналогами на электромоторах и других приводах», — добавил Андрей Зверев.